In this task you are supposed to help the Nao robot kick the ball as close to the target position as possible. To simplify this task, we will work in 2-dimensions and you can only control the robots right leg. Everything else is fixed in position. For defining a kick motion, you should set the angles for the three parts of the Nao leg (thigh, tibia and foot).
Note that every joint has a minimum and maximum angle.
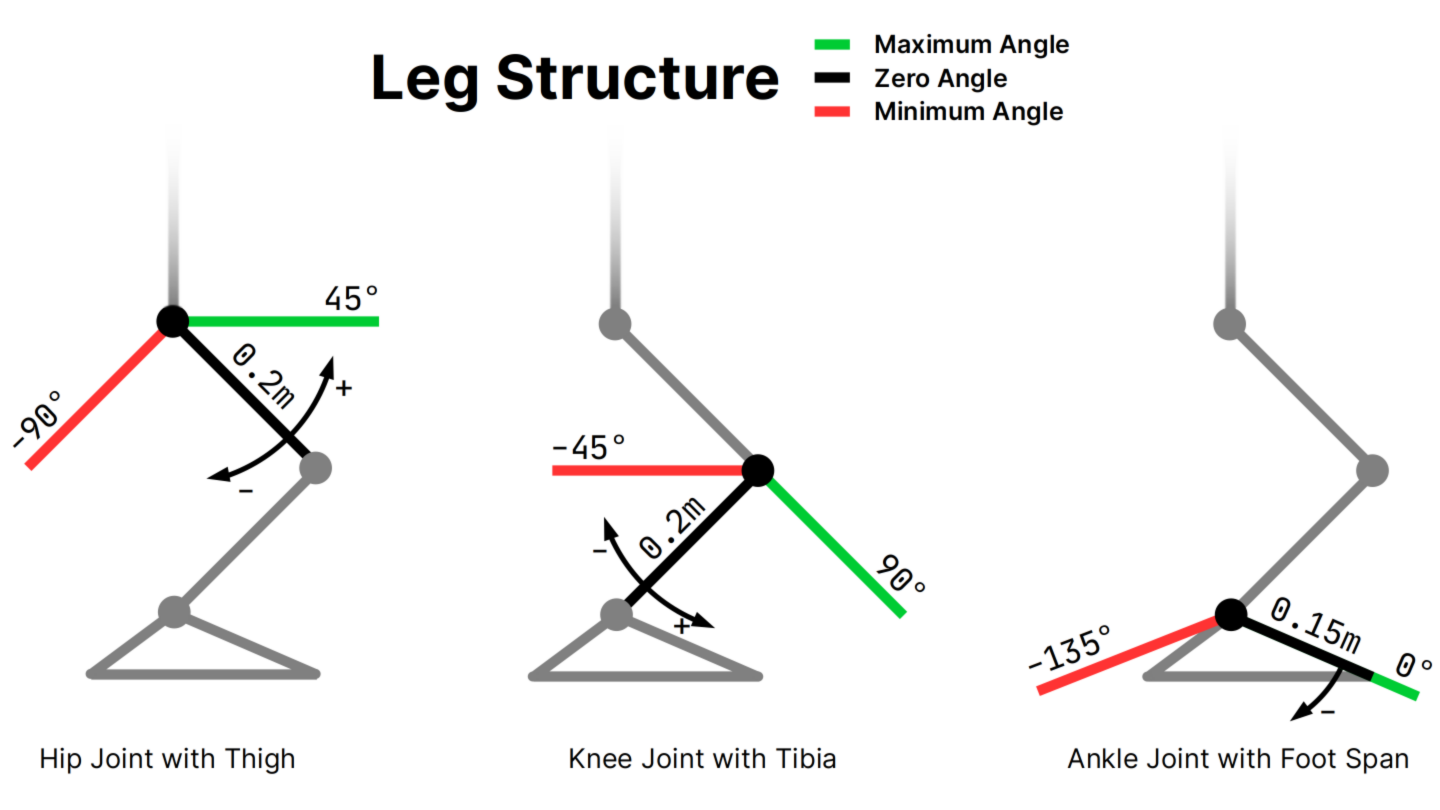
A motion is defined by a list of keyframes. Each keyframe contains the target angles (in radians) of the thigh, tibia and foot joints as well as the duration in which the keyframe should be executed. The position of the three joints and the neutral angles can be seen in the picture below.
In order to familiarise you with the concept of keyframes, your first task is to find keyframes by trying out different values. The text editor below already contains a list of 5 keyframes. When you press the "Generate animation button", you will see how these keyframes make the Nao robot move.
Now, it is your turn to tell the Nao how to move. Change the angle and duration values in the keyframes, delete keyframes, or add new ones. And don't forget to regularly try out your code by pressing "Save" and then "Generate animation".
Remember that the ultimate goal is to kick the ball as close to the target as possible, so try to generate motions that resemble a kick.
In the following sections, we explore how end effector positions and joint angles can be computed with kinematic chains. A kinematic chain is a mathematical model of how joints are connected together. It allows to calculate the position of the end effector from joint angles (forward kinematics) or joint angles from the position of the end effector (inverse kinematics).
With the so called forward kinematics one can calculate the position of the end effector from the set of involved joint angles. Just from common sense it is obvious that such a calculation is possible because the position in space is exactly defined when given all joint angles. Since we want to control the robot's leg, we need a model of the leg first. Recall the leg structure that we introduced earlier:
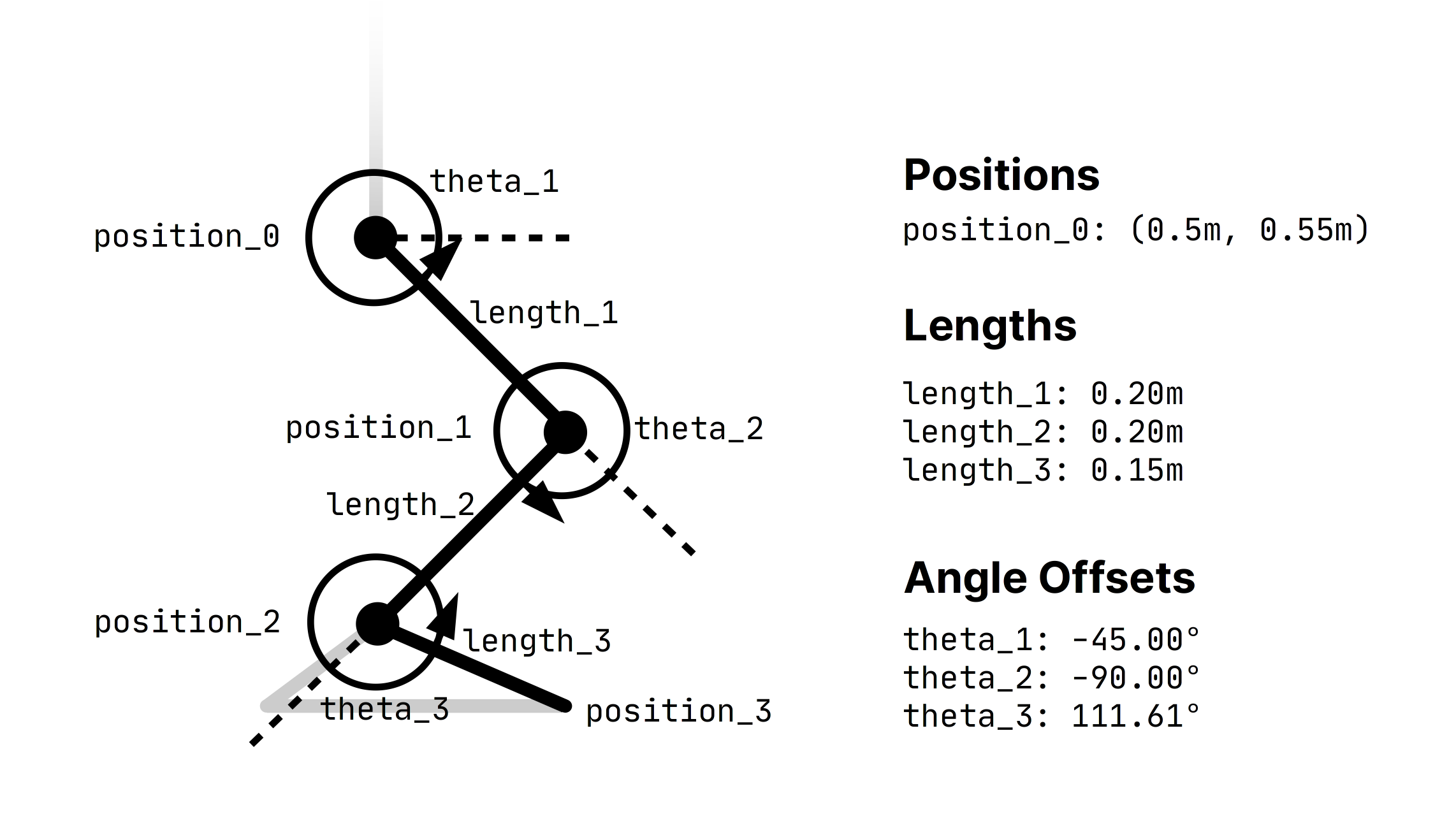
The kinematic chain is constructed starting at the hip of the robot where the leg is mounted. In our case, this is the position of the hip joint or position_0. For calculating position_1 at the end of the thigh with the length length_1 and angle theta_1:
theta_1_with_offset = theta_1 - math.radians(45)
position_1 = Vec2d(
position_0.x + math.cos(theta_1_with_offset) * length_1,
position_0.y + math.sin(theta_1_with_offset) * length_1,
)
The end position of the tibia (position_2) is rotated by theta_2 around position_1 and translated by length_2. Since the zero angle depends on theta_1, it is added to theta_2 (rotating the hip joint also rotates the end effector of our kinematic chain):
theta_2_with_offset = theta_1_with_offset + theta_2 - math.radians(90)
position_2 = Vec2d(
position_1.x + math.cos(theta_2_with_offset) * length_2,
position_1.y + math.sin(theta_2_with_offset) * length_2,
)
Lastly, the end position of the foot span (position_3) is rotated by theta_3 around position_2 and translated by length_3. Again, the previous rotation theta_2 is added to theta_3:
theta_3_with_offset = theta_2_with_offset + theta_3 + math.radians(111.61)
position_3 = Vec2d(
position_2.x + math.cos(theta_3_with_offset) * length_3,
position_2.y + math.sin(theta_3_with_offset) * length_3,
)
When combining all calculations together, we can now calculate all positions and rotations of the joints given the joint angles. In the following code, the forward kinematics calculations are defined in the function forward_kinematics(). This function takes as arguments the initial position position_0, all joint angles theta_*, and all segment lengths length_*. It returns all joint positions and the rotation of the end effector, i.e. rotation_3 (at position_3):
You can execute the above code by saving it and then clicking the "Apply Forward Kinematics" button. Feel free to change the code (e.g. the angles theta_*).
The output shows a visualization of the calculated joint positions with the help of the forward kinematics:
We can see that the forward kinematics are an easy way to calculate the end effector position and rotation given all joint angles and segment lengths. In the next section, we will use inverse kinematics to calculate the joint angles from a given end effector position and rotation.
Inverse kinematics describe the inverse transform of the above described forward kinematics. In other words, when given a desired position and rotation of an end effector, one can obtain the joint angles necessary to reach this position from the inverse kinematics. One could use the forward kinematics to form an equation system for finding the joint angles (forward kinematics: joint angles -> position, inverse kinematics: position -> joint angles).
In contrast to the forward kinematics such a solution does not always exist and even if it exists, it can be ambiguous. In our example, we may have one of three possible cases: 1. no solution (impossible to reach that position), 2. one solution (only one set of joint angles reach the position), 3. two solutions (position is reachable with two sets of joint angles). As a more understandable example, consider holding your hand in fixed position in front of your head. You will find that there exist an infinite amount of different arm angles to achieve this, i.e. there exist infinite solutions for possible joint angles.
Calculating the inverse kinematics can be performed in many possible ways. In special cases, the inverse kinematics can be calculated analytically. But solving more complex forward kinematics may require numerical methods. In our example, we will calculate the inverse kinematics analytically and step-by-step to understand the concepts. Again, this is the kinematic chain used in the following sections:
Given an end effector position position_3 and rotation rotation_3 we will now calculate the required joint angles to reach the position. The calculation is divided into two parts: First, calculating the position position_2 and then calculating the remaining angles theta_3, theta_2, and theta_1. Since we start with the position of the end effector and rotation, the position_2 is simply the vector from position_3 rotated by rotation_3 with length length_3 (the vector is subtracted to point in the other direction, i.e. to position_2):
position_2 = Vec2d(
position_3.x - math.cos(rotation_3) * length_3,
position_3.y - math.sin(rotation_3) * length_3,
)
This achieves the first step of our calculation. The second step is to calculate the joint angles. As mentioned earlier, we might either not reach the end effector position (because the leg is simply too short), or the joint angles may be ambiguous. In the inverse kinematics calculation, we know the hip joint position position_0 which means we can calculate the euclidian distance between position_0 and position_2. We consider three cases:
position_0 and position_2 is larger than length_1 + length_2.position_0 and position_2 is equal to length_1 + length_2.position_0 and position_2 is smaller than length_1 + length_2.In case 1 there exists no solution (leg is too short), case 2 yields one exact solution of joint angles (non-ambiguous), and case 3 creates two possible sets of joint angles (ambiguous).
Let's begin with case 1 (leg too short): In this case the inverse kinematics does not have any solution. There does not exist any set of joint angles reaching the given end effector position and rotation.
In case 2 (non-ambiguous) the leg is fully stretched (no rotation change in knee joint, i.e. 90° when including angle offsets):
theta_2 = 0
theta_2_with_offset = theta_2 + math.radians(90)
theta_1 is calculated as the angle between -45° (angle offset) and the distance vector of position_0 to position_2:
theta_1 = math.atan((position_2.y - position_0.y) /
(position_2.x - position_0.x))
theta_1_with_offset = theta_1 + math.radians(45)
The ankle joint must rotate to the final rotation rotation_3 which means it is the remaining angle theta_3 (since theta_2 is zero, it can be omitted):
theta_3 = rotation_3 - theta_1 - theta_2
theta_3_with_offset = theta_3 - math.radians(111.61)
The inverse kinematics for case 2 yields the joint angles theta_*_with_offset.
For case 3 (ambiguous) the inverse kinematics has two possible positions for the knee joint because the leg is longer than the distance between position_0 and position_2. We are interested in the angles of the joints and already know the lengths between the joints. With the law of cosines we can interpret the two solutions for the inverse kinematics as two triangles:
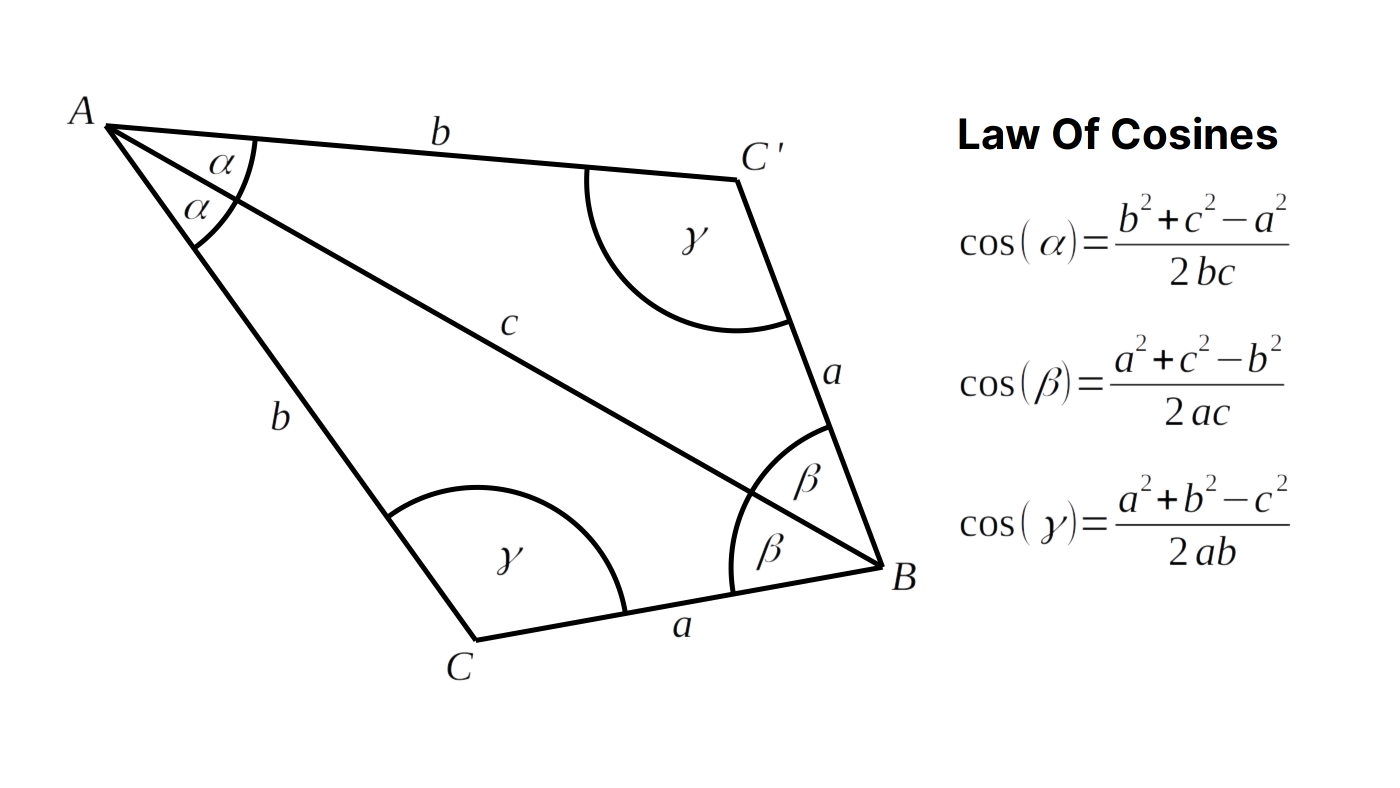
Assume that the point A is position_0, C and C' are the two solutions for position_1, and B is position_2. Then α corresponds to theta_1, γ corresponds to theta_2, and β corresponds to theta_3 (they are not the same because of angle and rotation offsets). The lengths a and b are thigh and tibia length (0.2m), c is the distance between position_0 and position_2.
First, the rotation of the distance vector of position_0 to position_2 is calculated (as before but we don't need the angle offset):
theta_1_1 = math.atan((position_2.y - position_0.y) /
(position_2.x - position_0.x))
This angle represents the rotation of the c line in the triangle above. The angle α is calculated with:
theta_1_2 = math.acos(
(distance_0_to_2 ** 2 + length_1 ** 2 - length_2 ** 2) /
(2 * distance_0_to_2 * length_1),
)
The resulting angles for both joint angle solutions are calculated by substracting or adding α to the rotation of the distance vector:
first_theta_1 = theta_1_1 - theta_1_2
second_theta_1 = theta_1_1 + theta_1_2
first_theta_1_with_offset = first_theta_1 + math.radians(45)
second_theta_1_with_offset = second_theta_1 + math.radians(45)
The next step is to calculate the angle γ with the same approach:
theta_2 = math.acos(
(length_1 ** 2 + length_2 ** 2 - distance_0_to_2 ** 2) /
(2 * length_1 * length_2),
)
The angle γ measures between the thigh and tibia but is rotated by 180° and again substracted or added:
first_theta_2 = math.pi - theta_2_1
second_theta_2 = theta_2_1 - math.pi
first_theta_2_with_offset = first_theta_2 + math.radians(90)
second_theta_2_with_offset = second_theta_2 + math.radians(90)
The third angle theta_3 can be calculated by substracting theta_1 and theta_2 from rotation_3 because the sum of all three angles must result in the rotation of the end effector:
first_theta_3 = rotation_3 - first_theta_1 - first_theta_2
second_theta_3 = rotation_3 - second_theta_1 - second_theta_2
first_theta_3_with_offset = first_theta_3 - math.radians(111.61)
second_theta_3_with_offset = second_theta_3 - math.radians(111.61)
At this point, all required calculations for the inverse kinematics are finished which allow calculating the required joint angles for reaching the end effector position and rotation. The following code contains the inverse kinematics calculations in the function inverse_kinematics(). This function takes as arguments the initial position position_0, the end effector position position_3 and rotation rotation_3, and all segment lengths length_*. It returns the joint angles, i.e. theta_*:
You can execute the above code by saving it and then clicking the "Apply Inverse Kinematics" button. Feel free to change for example the end effector position position_3 and rotation rotation_3.
The output shows a visualization of the joints when moved to their calculated angles with the help of the inverse kinematics:
Inverse kinematics allow to calculate the joint angles from the end effector position and rotation. Not all kinematic chains in the real world are as easily computable as our example. Often they cannot be solved analytically but require numerical methods. In the next section we will use the inverse kinematics to calculate the joint angles of our example NAO robot and try to kick the ball at the correct position.
As you can see, not all solutions of the inverse kinematics are feasible, as they can violate joint angle limits. Such infeasible solutions are beeing discarded in the following code.